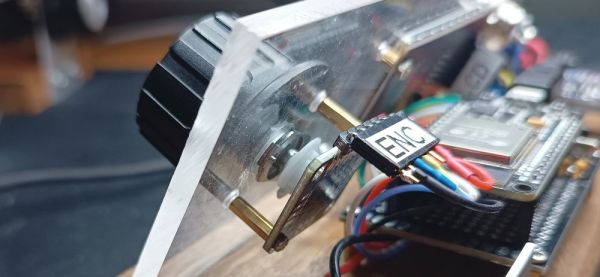
I recently came across a discussion on Reddit about MT6701 working modes, where someone referenced my earlier posts on using a magnetic sensor as a rotary encoder. That prompted me to look more closely at the different MT6701 modules currently available and how suitable they are as drop-in replacements for mechanical encoders. What's the point... Continue Reading →
Comparing MT6701 Modules for Rotary Encoder Replacement