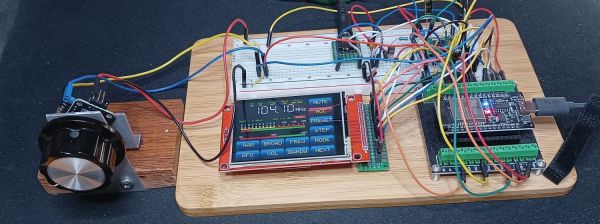
If there was only one type of electronics project I was allowed to work on, I think it would be clocks. I've made a few and I regularly get the urge to make more. I've been thinking about making one using an ESP32 and LCD display that synchronises with internet time servers.. That's how this... Continue Reading →
Building a Simple Internet Clock Using an ESP32 and ST7789 LCD